
-
 基于丰富的产品,针对不同行业特性,深入场景,提供智能制造综合解决方案,助力企业智能化改造和数字化转型。
基于丰富的产品,针对不同行业特性,深入场景,提供智能制造综合解决方案,助力企业智能化改造和数字化转型。 -
-
基于丰富的产品,针对不同行业特性,深入场景,提供智能制造综合解决方案,助力企业智能化改造和数字化转型。
-
基于丰富的产品,针对不同行业特性,深入场景,提供智能制造综合解决方案,助力企业智能化改造和数字化转型。
-
基于丰富的产品,针对不同行业特性,深入场景,提供智能制造综合解决方案,助力企业智能化改造和数字化转型。
-
基于丰富的产品,针对不同行业特性,深入场景,提供智能制造综合解决方案,助力企业智能化改造和数字化转型。
-
基于丰富的产品,针对不同行业特性,深入场景,提供智能制造综合解决方案,助力企业智能化改造和数字化转型。
-
基于丰富的产品,针对不同行业特性,深入场景,提供智能制造综合解决方案,助力企业智能化改造和数字化转型。
 搜索
搜索
 EN
EN 集团成员
集团成员

机械手设备系统部分有PLC、人机界面、伺服系统等组成。人机界面,采用触摸屏,便于操纵人员设置参数及对整台设备运行状态的监控,负责人机对话交流。PLC做为核心程序的载体,负责脉冲信号的发送控制伺服及各种反馈信号的处理,控制各实行机构的运转与协调。伺服系统,由驱动,伺服电机,码盘反馈信号构成,作为主要运动机构,主要任务是完成定位精度的克制,严厉实行来自PLC的脉冲号令克制,同时,保障在屡次启用负载下亲身运动的安稳性与快速响应性,伺服性能直接反映了整台设备的整机性能与品质。

1、摘要
本文基于对机械手工作原理等的分析,介绍了之山G系列伺服系统在机械手上的应用
2、机械手设备组成
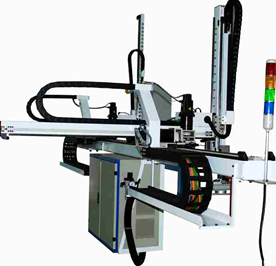
机械手设备系统部分有PLC、人机界面、伺服系统等组成。人机界面,采用触摸屏,便于操纵人员设置参数及对整台设备运行状态的监控,负责人机对话交流。PLC做为核心程序的载体,负责脉冲信号的发送控制伺服及各种反馈信号的处理,控制各实行机构的运转与协调。伺服系统,由驱动,伺服电机,码盘反馈信号构成,作为主要运动机构,主要任务是完成定位精度的克制,严厉实行来自PLC的脉冲号令克制,同时,保障在屡次启用负载下亲身运动的安稳性与快速响应性,伺服性能直接反映了整台设备的整机性能与品质。机械手外形图如图所示:
3、机械手原理简介
机械手的工作原理其实就是靠伺服电机进行驱动, 由于伺服电机能够计算详细的回转圈数,所以可以计算出运动的距离, 机械手上常说的轴, 是以回转部位来计算的, 一个回转部位算一个轴。机械手的控制柜内是伺服模块和运算基板, 用于控制伺服电机的动作和计算相对位置。
伺服驱动器接收PLC脉冲指令驱动电机带动机头作定位运动。定位运行的过程中运行要平稳滑顺,伺服的运行速度将决定机械手的工作效率是否能够满足客户的应用要求,在高速定位的时伺服电机不能出现过冲,震荡以及整定时间过长。
4、调试注意事项
为了保证伺服驱动器能够可靠、稳定、正确的运行,在伺服系统的安装、调试以及使用过程中,应注意以下事项:
1)正确的接线:之山伺服标配编码器线和电机动力线,不过接线时一定要正确连接伺服驱动器与控制器之间的信号线,否则伺服不会正常运行;
2)正确的设置伺服控制模式:由于每种机器应用都有所不同,所以正确的设置伺服控制模式是保证伺服正确运行的前提;
3)根据实际运行效果正确匹配增益参数,另外之山伺服不要在伺服使能的情况下或电机运行的情况下设置电子位置环和齿轮比参数。
4)确保电机良好的接地,驱动器与设备机壳连接。一方面避免干扰,另一方面避免漏电。
5)信号线尽量选择屏蔽双绞线,屏蔽层一般接到端子外壳;
6)注意干扰问题,避免编码器信号和控制信号受到干扰,编码器线、信号线不要与电机线、电源线绑扎在一起或者通过一个线槽,尽量保持一定的距离。
5、结论
此机械手充分结合了之山G系列的响应快、定位精确、整定时间短、运行平稳等优点。使客户达到最大的满意度。此设备向客户充分展示了之山伺服的优势,同时也提高了机械手设备在市场上的竞争力。
上一页
联系我们
智慧电梯:400-820-7921
变频驱动:400-821-0325
运动控制:400-821-0325
多关节机器人:400-920-0275
SCARA机器人:400-168-2178
邮箱:market@stepelectric.com
地址:上海市嘉定区美裕路599号,201802
扫一扫关注新时达
新时达服务号
新时达订阅号