
-
 基于丰富的产品,针对不同行业特性,深入场景,提供智能制造综合解决方案,助力企业智能化改造和数字化转型。
基于丰富的产品,针对不同行业特性,深入场景,提供智能制造综合解决方案,助力企业智能化改造和数字化转型。 -
-
基于丰富的产品,针对不同行业特性,深入场景,提供智能制造综合解决方案,助力企业智能化改造和数字化转型。
-
基于丰富的产品,针对不同行业特性,深入场景,提供智能制造综合解决方案,助力企业智能化改造和数字化转型。
-
基于丰富的产品,针对不同行业特性,深入场景,提供智能制造综合解决方案,助力企业智能化改造和数字化转型。
-
基于丰富的产品,针对不同行业特性,深入场景,提供智能制造综合解决方案,助力企业智能化改造和数字化转型。
-
基于丰富的产品,针对不同行业特性,深入场景,提供智能制造综合解决方案,助力企业智能化改造和数字化转型。
-
基于丰富的产品,针对不同行业特性,深入场景,提供智能制造综合解决方案,助力企业智能化改造和数字化转型。
 搜索
搜索
 EN
EN 集团成员
集团成员

辛格林纳多轴伺服案例应用
并联机器人定义为动平台和定平台通过两个或以上独立的运动链相连接,结构具有两个或两个以上的自由度,通过并联的方式来驱动的一种闭环机构。
并联机器人通过电机置于定平台上的方式,保证了运动部分的轻量化设计,能够达到重量轻、速度高、节拍快的特点。配合视觉检测系统和动态抓取,其广泛应用于食品、医药、电子等轻工业,在物料的搬运、包装、分拣等方面有着无可比拟的优势,大幅度提高了流水线上的生产效率。
1 设备主要结构
常见的并联机器人如下图所示的四轴机器,能够沿三位空间X、Y、Z轴平动和绕Z轴旋转的功能。其机械结构通过电机连接减速机后直连主臂,主臂通过限位器连接副臂,在定平台上或者动平台上会有第四轴用于绕Z轴旋转。运动时,电机带动主臂在一定角度内上下摆动,带动副臂实现动平台的精准定位动作。

2 Ωm-N1伺服驱动器
本方案采用了辛格林纳(Sigriner)Ωm-N1系列多轴伺服驱动。该系统采用EtherCAT总线通讯,基于直流母线动力架构,支持多驱动单元级连供电,三轴一体和四轴一体可以灵活定制,满足不同的应用场景。
3 设备主要结构
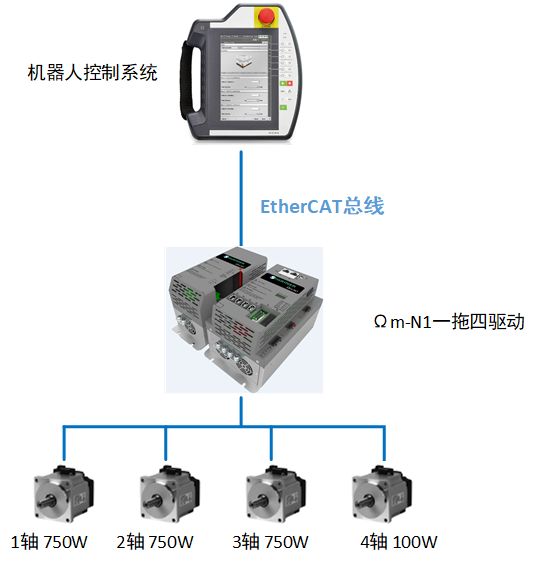
系统配置图

穿墙安装式伺服
方案主要配置如上图所示,机器人控制系统通过EtherCAT总线与Ωm-N1驱动连接,驱动下分别带有Delta机器人的1、2、3、4轴。一键刚性调整功能,能够简单快速完成系统响应性的调试,减少客户的调试时间。通过驱动的3倍过载能力和硬件电流环响应,能够保证在标准的门字形测试动作下节拍达到200次/分。出色的整定算法能够有效减少机械本体在高速运行中产生的抖动。
辛格林纳Ωm-N1产品借助其出色功率密度,对比同等功率的伺服,安装体积能够缩减30%左右,采用穿墙安装的方式,进一步提升柜内空间并提高电柜的防护等级。
视频
4 解决的问题
智能驱动,一键整定
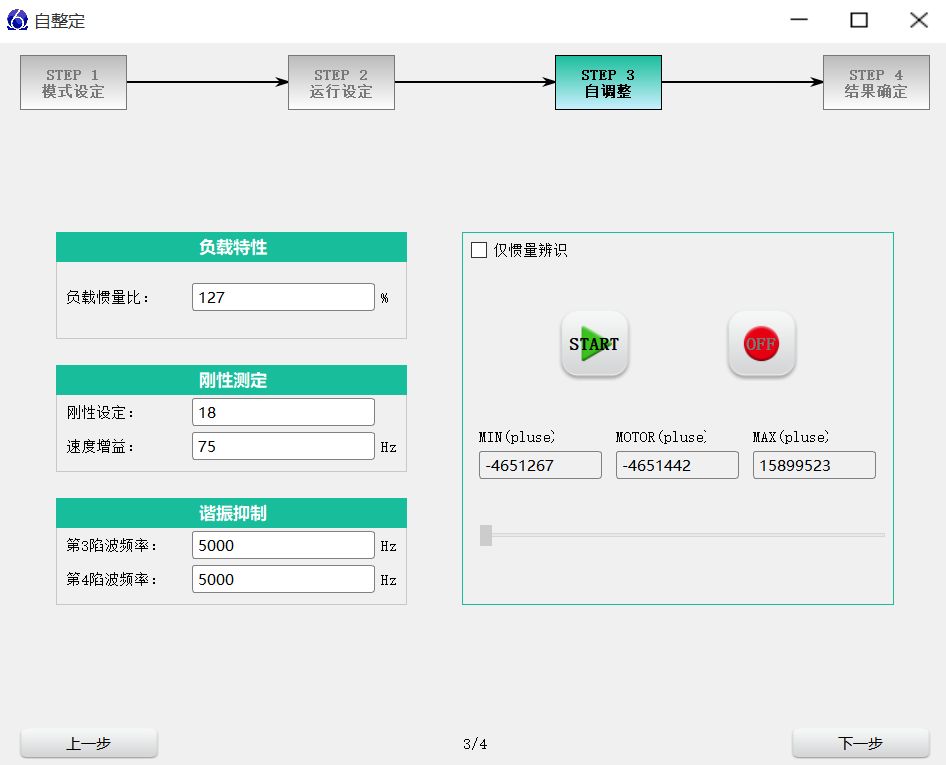
一键自整定功能

自整定完成参数
如图所示,借助Ω平台所搭建的一键自整定功能,客户能够轻松完成自整定的操作,整定后的参数直接满足设备使用需求,大幅缩减了现场使用人员的调试时间。
专治机械“帕金森”症
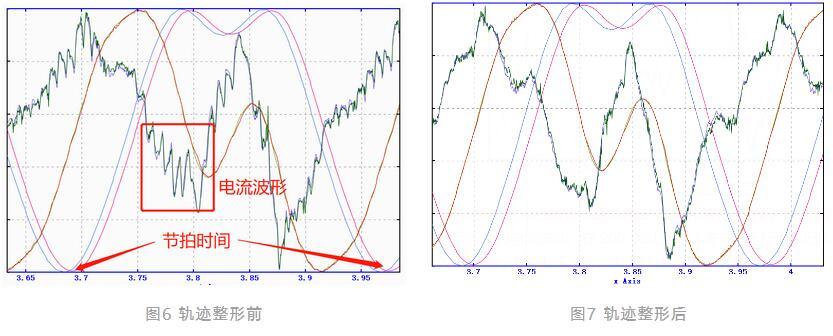
通过Ω平台出色的轨迹整形算法,在同样的控制指令下,借助整形算法后,能够有效减小设备运行中的电流波动。在200次以上的高速节拍运行中依旧能够保证机械的平稳运行,从而延长了机械本体的寿命。
多重保护,安心使用
在并联机械高速运行的时候,由于高速运行的节拍,如果缺少优秀的安全保护功能,在发生意外时可能会造成严重的撞机。Ω平台系列伺服拥有的动态制动、垂直跌落、指令异常、防下坠等保护功能,能够在发生意外时最大程度上保障客户设备及人员安全,减少意外发生造成的损失。
5 方案总结
Ω平台伺服采用标准的402协议,能够配合市面上主流的控制系统,包括Keba在内的机器人控制系统。
体积小巧,满足客户定制化需求
辛格林纳Ωm-N1驱动能够完美匹配并联机器人配置,体积小到一手掌握能够为客户节约电柜空间,选择支架安装,能进一步压缩安装空间,满足客户的定制化需求。
动态制动,避免飞车碰撞
借助动态制动功能,避免因为异常指令或动作导致系统不受控飞车发生碰撞。
试机无忧,节省调试时间
匹配自识别电机,能够免去客户调试的烦恼,只需一个刚性参数即可满足客户不同的响应需求,大幅度缩短了整定时间。
下一页
联系我们
智慧电梯:400-820-7921
变频驱动:400-821-0325
运动控制:400-821-0325
多关节机器人:400-920-0275
SCARA机器人:400-168-2178
邮箱:market@stepelectric.com
地址:上海市嘉定区美裕路599号,201802
扫一扫关注新时达
新时达服务号
新时达订阅号