
-
 基于丰富的产品,针对不同行业特性,深入场景,提供智能制造综合解决方案,助力企业智能化改造和数字化转型。
基于丰富的产品,针对不同行业特性,深入场景,提供智能制造综合解决方案,助力企业智能化改造和数字化转型。 -
-
基于丰富的产品,针对不同行业特性,深入场景,提供智能制造综合解决方案,助力企业智能化改造和数字化转型。
-
基于丰富的产品,针对不同行业特性,深入场景,提供智能制造综合解决方案,助力企业智能化改造和数字化转型。
-
基于丰富的产品,针对不同行业特性,深入场景,提供智能制造综合解决方案,助力企业智能化改造和数字化转型。
-
基于丰富的产品,针对不同行业特性,深入场景,提供智能制造综合解决方案,助力企业智能化改造和数字化转型。
-
基于丰富的产品,针对不同行业特性,深入场景,提供智能制造综合解决方案,助力企业智能化改造和数字化转型。
-
基于丰富的产品,针对不同行业特性,深入场景,提供智能制造综合解决方案,助力企业智能化改造和数字化转型。
 搜索
搜索
 EN
EN 集团成员
集团成员
什么是机器人本体?
发布时间:
2024-07-19 13:31
机器人本体,通常指的是工业机器人中的机械体系,广泛被称为操作机。它既是执行机构,又是支撑基础,承担着机器人完成各种任务的核心角色。机器人本体不仅仅包括机器人的物理形态如机身、臂部、腕部和手部等外部结构,还涉及其内部的构造和运行原理,是机器人能够顺利执行各种任务的关键所在。
一、机器人本体的核心组成
机器人本体通常由以下几个主要部分构成:
动力传递组件:负责将动力传递给机器人的各个部位,是其顺畅运行的根基。
主干框架及移动底座:作为机器人的核心支架,为其他模块提供坚实的支撑,并可能集成移动功能。
操作臂:连接主干和手部,赋予机器人多维运动的能力。
手腕关节:位于操作臂和手部之间,具备一个或多个自由度,用于精确调整手部的方向。
执行手:作为机器人的末端操作装置,负责实现具体的操作任务,如抓取、携带、加工等。
二、机器人本体的分类概览
根据机械结构的差异,机器人本体可以划分为以下几个类型:
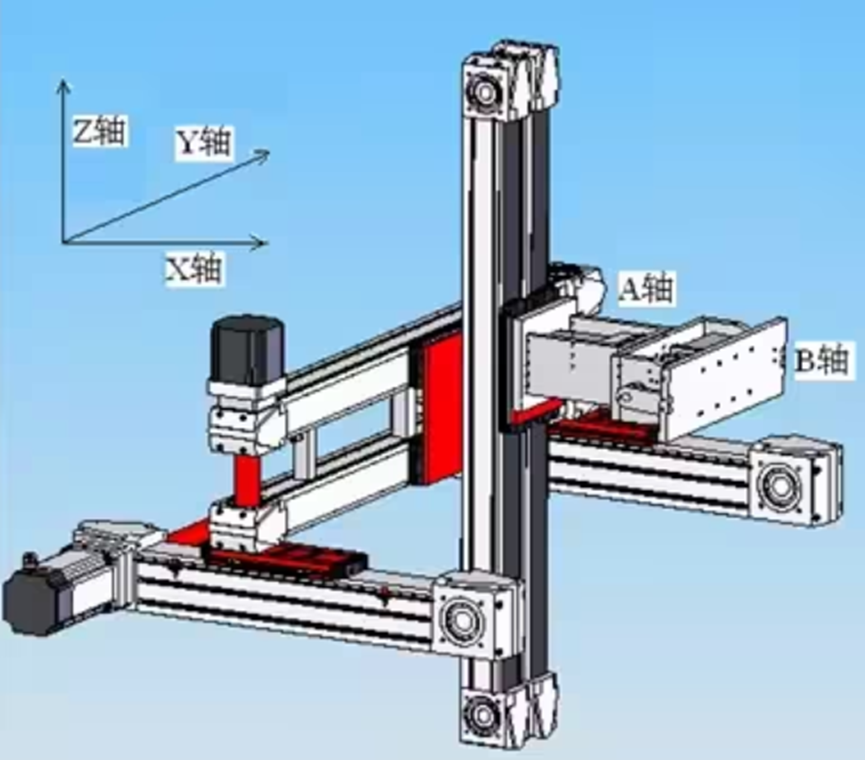
直线坐标机器人:这种机器人具备沿X、Y、Z三个直线轴的运动能力,其设计简洁,但灵活度相对较低。
SCARA机器人:即选择顺应性装配机器手臂,它拥有两个旋转关节和一个直线关节,特别适合于在水平平面内进行快速精准的定位工作。

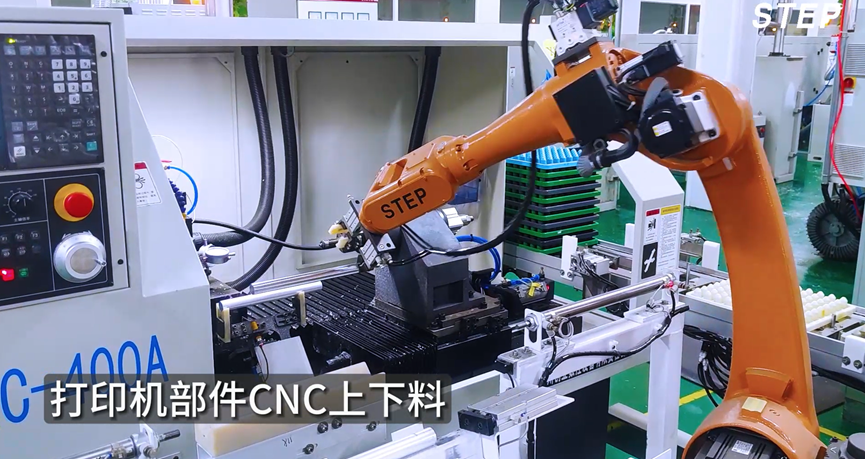
多关节机器人:装备了多个旋转关节,这类机器人能够模仿人类手臂的某些动作,展现出高度的灵活性和适应能力。

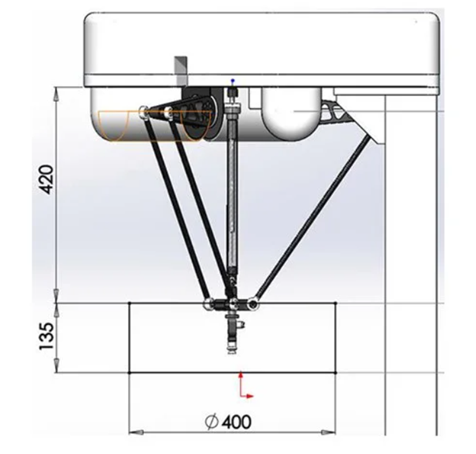
并联机器人:采用并行机械结构,这种机器人结构稳固、精确度高,且具有较强的负载能力。
三、机器人本体的技术规格
机器人本体的技术规格决定了其在各种工作场景中的适应能力和性能表现。这些规格涵盖了精度、速度、负载能力等关键指标,并且依据不同行业和应用需求有所差异。以下是对几个常见应用领域中机器人技术规格的概述:
在汽车制造领域,例如焊接机器人,对精度和速度的要求尤为严格。这要求机器人本体具有高度精确的运动控制能力和快速响应性,以确保焊接过程的效率和质量。

对于电子行业的SCARA机器人,其技术规格则强调高定位精度和较快的运动速度。这是因为在电子组件的组装和分拣过程中,需要机器人能够精确快速地完成细小零件的处理。
再如,码垛和搬运应用中的机器人,其技术规格通常要求有较大的负载能力和良好的稳定性。这类机器人本体需具备坚固的结构和高效的传动系统,以适应重复搬运过程中的持续运作。

除了上述特定应用外,机器人本体的通用技术规格还包括结构的刚度、动力学性能、以及系统的固有频率等。这些参数直接影响机器人在操作中的稳定性和效率
四、机器人本体的驱动方式
机器人本体的驱动方式是实现其运动和执行任务的基本动力来源。
机器人本体的驱动方式包括电动机驱动、液压驱动和气压驱动,每种方式各有优劣,适用于不同的应用场景。电动机驱动由于其环保、精度高、维护成本低等优势而被广泛应用。液压驱动则因其强大的输出力和较低的运动速度,适用于需要较大推力或转矩的场合。而气压驱动则以其简单高效、成本低、无污染等优点,在特定领域得到应用。
机器人,机器人本体,什么是机器人本体
上一页
下一页
联系我们

智慧电梯:400-820-7921
变频驱动:400-821-0325
运动控制:400-821-0325
多关节机器人:400-920-0275
SCARA机器人:400-168-2178
邮箱:market@stepelectric.com
地址:上海市嘉定区美裕路599号,201802
扫一扫关注新时达
新时达服务号
新时达订阅号